Mid-term progress presentation
Håkon, Ole og Vegard
Mon - 14 Oct 2019
UAV Localization
- Global vs Local
- Sensors
- Inertial navigation system(INS)
- Visual odometry
- GPS/GNSS
- Monte Carlo Localization(MCL)
Monte Carlo Localization
Problems
- Robustness:
- Lighting conditions
- Environmental changes
- Optimization:
- Response time
- Computational power
First priority: Increasing robustness using ML
- Semantic segmentation
- Feature extraction
- Faster local-localization
- Invariance to
- Lighting conditions
- Environmental change
2nd priority: Optimizing MCL
- Hush-hush / No idea yet
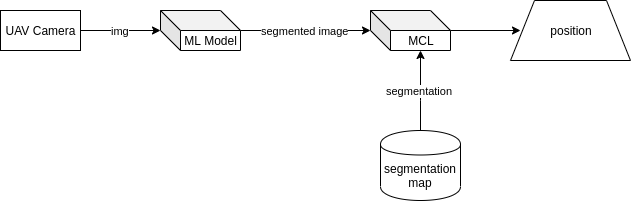
System

Progress 7%
- Obtain data
- Map Data
- Flight videos
- Create data-set
- Test different ML Models
- U-NET
- Adaptnet
- Evaluate models
- Conduct experiment with video
- (Optional) Conduct experiment RT on drone
- Write scientific paper and get world famous
Related work
- Vegard: Deep CNN-Based Framework For Enhanced Aerial Imagery Registration with Applications to UAV Geolocalization
- Ole Edvin: Vision-based Robot Localization Across Seasons and in Remote Locations, Anirudh Viswanathan, Bernardo R. Pires, and Daniel Huber
- Håkon: AdapNet: Adaptive Semantic Segmentation in Adverse Environmental Conditions