Deep CNN-Based Framework For Enhanced Aerial Imagery Registration with Applications to UAV Geolocalization
Ahmed Nassar, Karim Amer, Reda ElHakim, Mohamed ElHelw
Vegard Bergsvik Øvstegård
Fri - 18 Oct 2019
Components

Input images
Input images
- On-board camera(Bird’s eye view)
- Video frame
- Reference image(Satellite Map)
- $R$
- Known GPS-bounds
- Not Global
- Cheating with starting positon
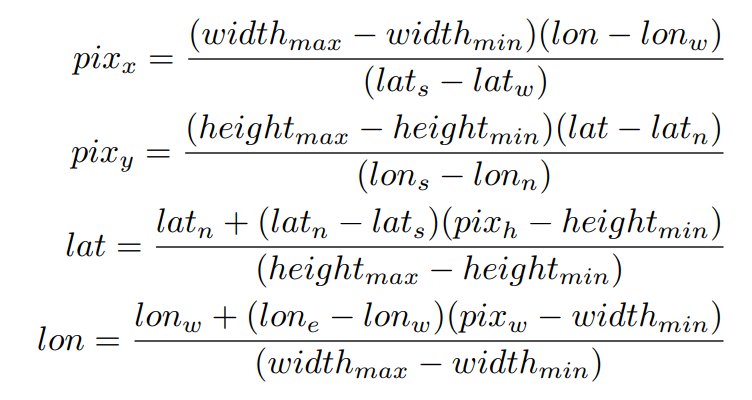
$Maths..$
$R$


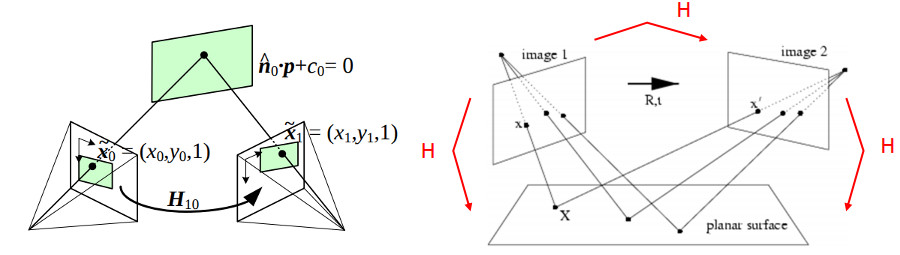
Calibration
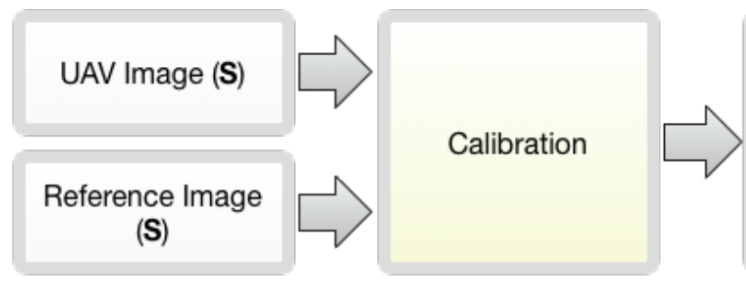
Calibration
- Where is in ?
- Affine geometric transformation
- Map $S_i$ with FOV consideration
- Scale
- Orientation
- Map $S_i$ with FOV consideration
- Remember -> framework is cheating
- Reduced search space: $r = R(l, w_{s+b})$
- Calibrates on $S_1$ and every $S_{(i+3)}$
- Scale Invariant Feature Transform(SIFT)
- Random Sample Consensus(RANSAC) -> Homography matrix
- Describes movement of UAV related to R.
SIFT
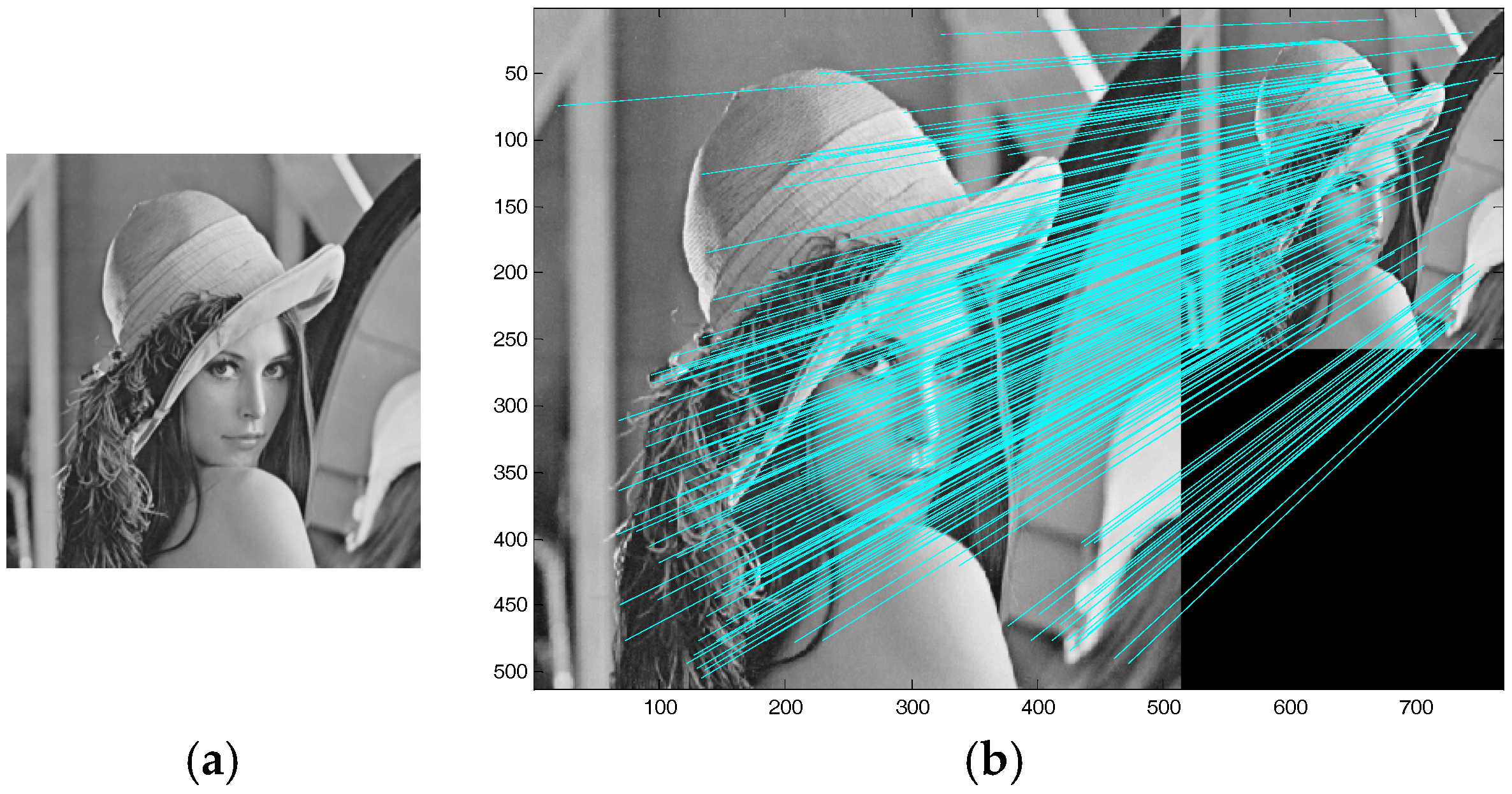
Homography
Sequential frame registration
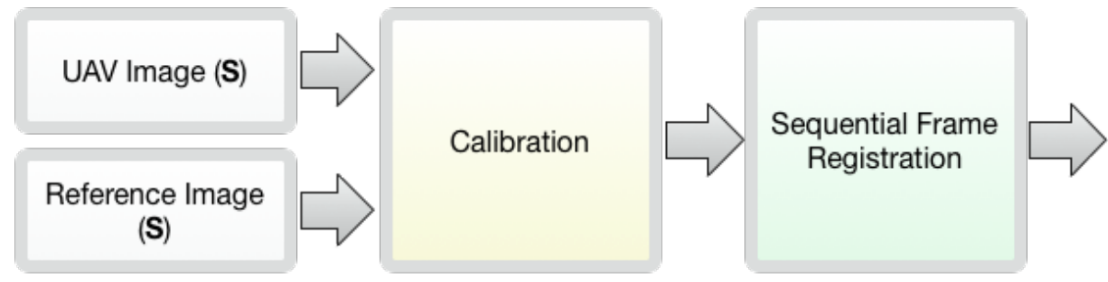
Sequential frame registration
- Similar to Calibration stage
- Every non-calibration frame
- Uses ORB -> Homography -> Translation
Oriented FAST and Rotated BRIEF(ORB)
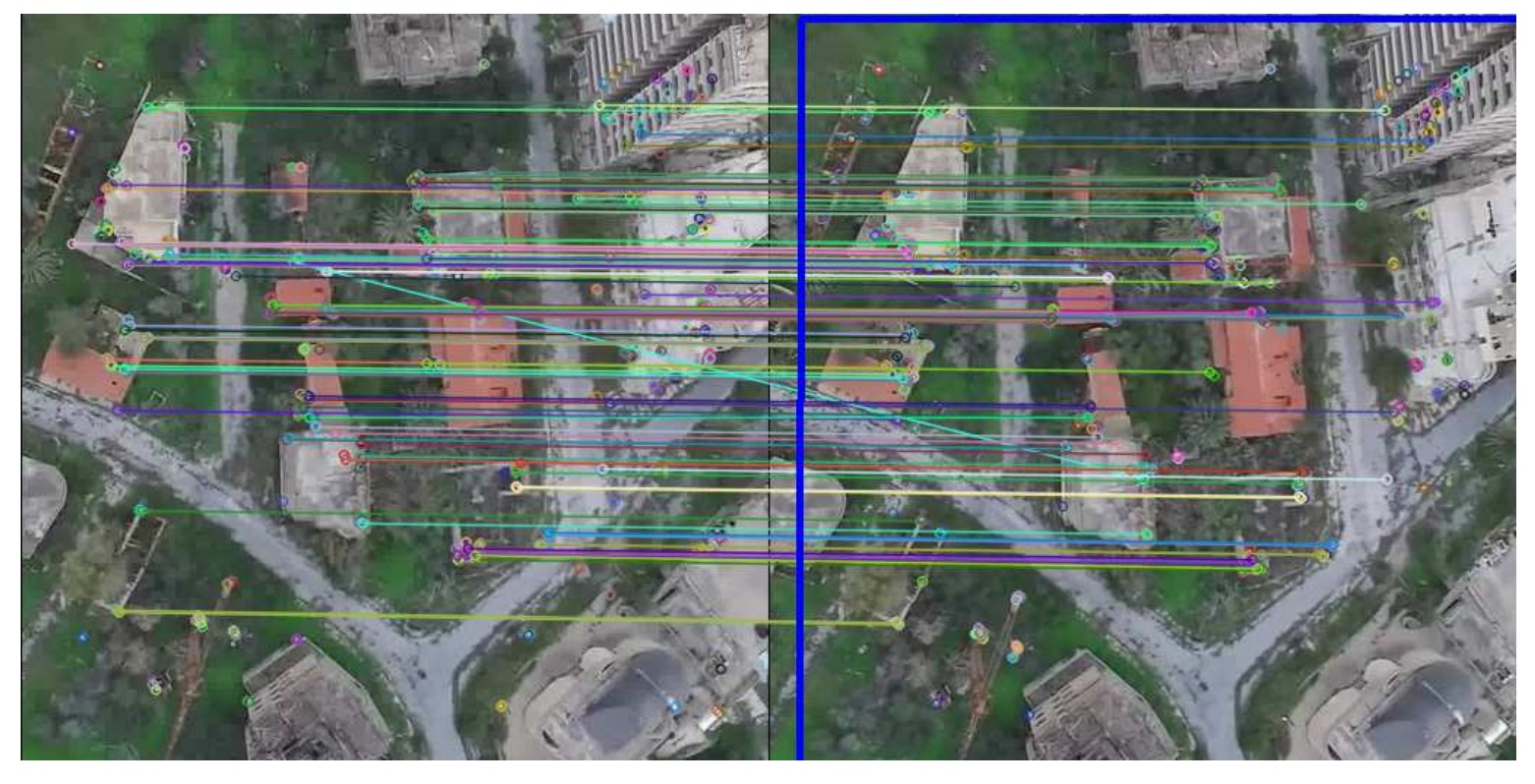
ORB
- Two orders of magnitude faster than SIFT
- Does not handle scale variance robustly
Semantic Segmentation Using U-net

U-net
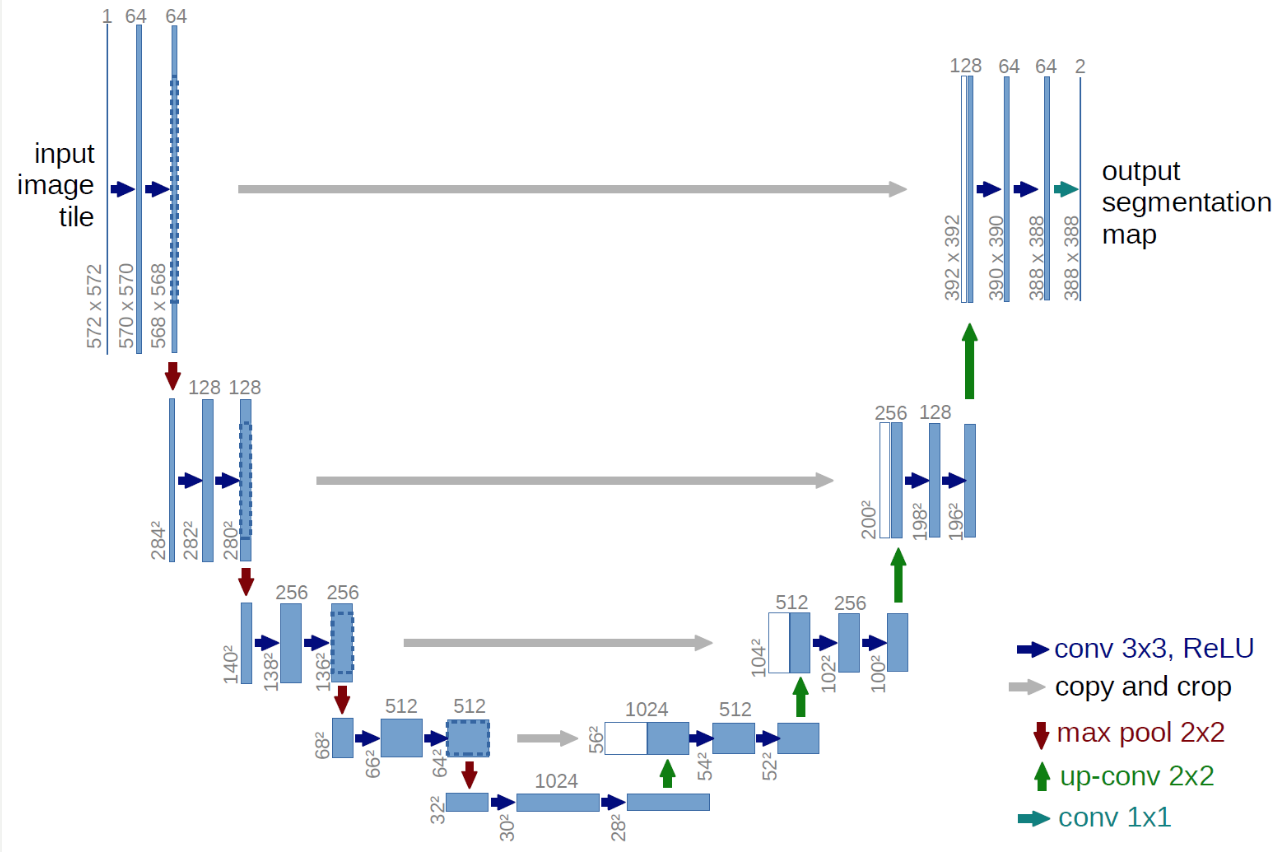
U-net

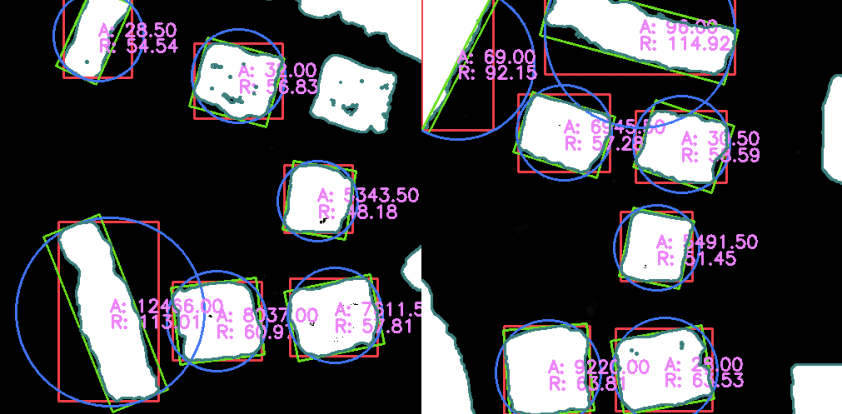
Semantic Shape Matching (SSM)
Processing U-net frames
- Fill gaps(Dilation -> Erosion)
- Remove outlier noise(Erosion - Dilation)
- Build dictionary of shapes
- Brute force matching shapes
- Check matches
- Calculate homography based on matched shapes
- Adjust location
Semantic Shape Matching (SSM)
- Morphology
- Buildings
- Roads
Experiments and Results
- No real-life testing
- Only tested on two cities
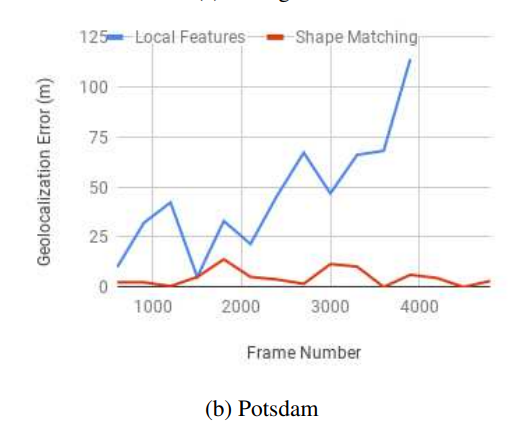
- Potsdam
- Simulated flight with Google Earth
- 6.3m average drift for local feature mapping
- 3.6m average drift for SSM
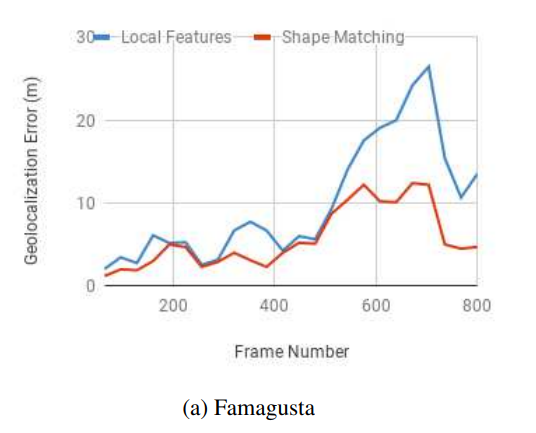
- Famagusta
- YouTube Video
- 10.4m average drift local feature mapping
- 5.1m average drift for SSM
- Lower resolution for $R$ and $S$
- Potsdam
- Used manually-labelled GPS coordinates!
Experiments and Results
Experiments and Results
Experiments and Results
- Robustness?
- Computation?